Семинар¶
Постановка задачи.¶
Сначала вспомним постановку задачи. Как и в предыдущих задачах, мы хотим максимизировать логарифм функции правдоподобия \(\ell(x | \theta)\), чтобы найти оценку вектора параметров \(\theta\). Однако бывает так, что эта функция имеет такой вид, что максимизировать сложно (например, если под логарифмом оказывается сумма). Идея EM-алгоритма состоит в том, чтобы ввести латентные переменные \(z\) и использовать совместное распределение \(p(X, Z)\) для нахождения \(\hat{\theta}\).
EM-алгоритм в общем виде.¶
Инициализация: задать начальные условия на \(\theta_{old}\).
E.1-шаг: найти условное распределение латентных переменных \(p(Z | X, \theta_{old})\).
E.2-шаг: построить функцию \(Q(\theta, \theta_{old}) = E_{Z | X, \theta}(\ell(x, z | \theta) | x, \theta_{old})\).
M-шаг: максимизировать \(Q\) по \(\theta\).
Далее повторять E- и M-шаги до сходимости.
Обоснование EM-алгоритма.¶
Для обоснования ЕМ-алгоритма и понимания обозначений рассмотрим пример:
Пусть \(X_1, X_2, \ldots, X_n\) \(\sim f(x, | \theta)\), где \(f\) – какая-то функция плотности, \(\theta\) – вектор неизвестных параметров этой плотности.
Пусть латентные переменные принимают всего два значения: \(Z \in \{0, 1\}\) – с вероятностями \(P(Z = 0) = p_1\), \(P(Z = 1) = 1-p_1\).
Тогда \(\ell(x | \theta) = \sum_i \ln f(x_i | \theta)\).
Заметим, что
(чтобы понять последний переход, распишите знаменатель выражения под логарифмом по формуле условной вероятности)
Так как \(D_{KL} \ge 0\), то \(M(P(Z = j), \theta)\) является нижней оценкой на логарифм правдоподобия. Идея EM-алгоритма состоит в том, чтобы поочерёдно максимизировать \(M(P(Z = j), \theta)\) по \(P(Z = j)\) (на E-шаге) и по \(\theta\) (на M-шаге).
E-шаг.
Максимизируем \(M(P(Z = j), \theta)\) по \(P(Z = j)\).
Так как \(\ell(x | \theta)\) не зависит от \(P(Z = j)\), то максимум \(M(P(Z = j), \theta)\) по \(P(Z = j)\) будет достигнут, когда \(D_{KL}\) минимальна.
Минимальная \(D_{KL}(A || B)\) равна 0, и это достигается, когда \(A || B\). Из этого делаем вывод, что на E-шаге мы устанавливаем
M-шаг.
Максимизируем \(M(P(Z = j), \theta)\) по \(\theta\). Распишем \(M\) ещё раз:
Заметим, что знаменатель подлогарифмического выражения не зависит от \(\theta\). Выбросим его и заменим \(P(Z = j)\) на результат, полученный нами на E-шаге:
Далее мы максимизируем \(Q\) по по \(\theta\), обновляем \(\theta\) на аргмаксимум \(Q\), и возвращаемся к E-шагу.
Обозначения.¶
Теперь соотнесём обозначения из общей постановки EM-алгоритма с теми, что мы получили в примере.
\(p(Z)\) – это безусловное распределение \(Z\). По сути, это массив размера \(1\times k\), где \(k\) – число значений \(Z\).
\(p(Z | X, \theta_{old})\) – это условное распределение \(Z\) при условии выборки. По сути, это массив размера \(N\times k\), где \(N\) – размер выборки, \(k\) – число значений \(Z\). Каждая строчка есть вектор вероятностей того, что на данном наблюдении \(Z\) равно соответствующему значению.
\(E_{Z | X, \theta}(\cdot)\) – это сумма матожиданий \(\sum_i E_{Z | x_i, \theta}\) по всем наблюдениям выборки.
\(p(\cdot)\) – распределение того, что стоит в скобках. Эта функция может оказаться функцией вероятности или функцией плотности в зависимости от контекста.
Пример с лекции: задача о кластеризации (разделение смеси нормальных распределений).¶
import numpy as np
import matplotlib.pyplot as plt
np.random.seed(123)
y1 = np.random.normal(0, 1, 100)
y2 = np.random.normal(4, 1, 100)
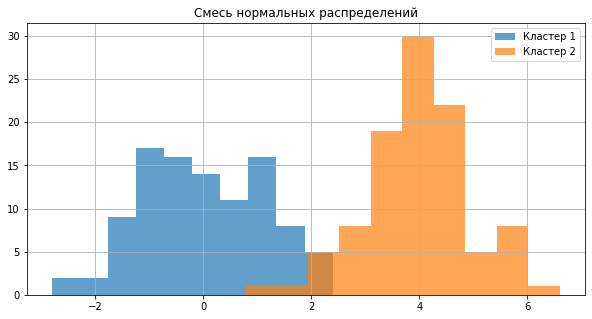
plt.figure(figsize = (10, 5))
_ = plt.hist(y1, alpha = 0.7, label = 'Кластер 1')
_ = plt.hist(y2, alpha = 0.7, label = 'Кластер 2')
_ = plt.legend()
_ = plt.title("Смесь нормальных распределений")
_ = plt.grid()
x = np.concatenate((y1, y2))
x.shape
(200,)
Постановка задачи.¶
Пусть мы точно знаем, что наблюдения принадлежат одному из двух кластеров. Пусть в первом кластере наблюдения берутся из нормального \(\mathcal{N}(\mu_1, \sigma_1^2)\) распределения, а во втором – из нормального \(\mathcal{N}(\mu_2, \sigma_2^2)\) распределения. Предположим, что все наблюдения независимы, и вероятность того, что наблюдение относится к первому кластеру, равна \(p_1\).
# Определите вектор параметров для данной задачи и задайте начальные условия
# theta = (mu_1, sigma2_1, mu2, sigma2_2, p_1)
# (воспользовались эвристикой)
theta = np.array([np.min(x), (np.max(x) - np.min(x)) / 2, np.max(x), (np.max(x) - np.min(x)) / 2, 1/2])
theta
array([-2.79858911, 4.69844652, 6.59830393, 4.69844652, 0.5 ])
Определение латентных переменных.¶
\(z \in \{1, 2\}\) – номер кластера.
Вспомним, что у нас есть обозначение \(p_1 = P(z = 1)\) – вероятность отнести наблюдение к первому кластеру.
E1-шаг.¶
Найти условное распределение латентных переменных \(p(Z | X, \theta_{old})\). Для данной задачи это означает, что мы должны получить массив \(200\times2\) (200 наблюдений, 2 значения \(z\)). Нам достаточно найти только один столбец массива – этот столбец будет размера \(200\times1\) (то есть вероятность того, что \(z = 1\)) – потому что второй столбец определяется однозначно как (\(1 - \) первый столбец).
По формуле условной вероятности: $\( p(z | x, \theta_{old}) = \dfrac{p(z, x | \theta_{old})}{p(x | \theta_{old})} \)$
и $\( p(x | z, \theta_{old}) = \dfrac{p(x, z | \theta_{old})}{p(z)} \)$
Тогда $\( P(z_i = 1 | x_i, \theta_{old}) = \dfrac{p(z_i = 1, x_i | \theta_{old})}{f(x_i | \theta_{old})} \)$
# Задайте плотность x
def f(x, mu, sigma2):
return 1 / np.sqrt(2 * np.pi * sigma2) * np.exp(-1/2 * 1/sigma2 * (x - mu)**2)
# Рассчитайте распределение латентных переменных на наших данных
p_z_1 = f(x, mu = theta[0], sigma2 = theta[1]) * theta[4] / (theta[4] * f(x, mu = theta[0], sigma2 = theta[1]) +
(1-theta[4]) * f(x, mu = theta[2], sigma2 = theta[3]))
# Заметим, что полученный массив имеет размер 200x1
p_z_1.shape
(200,)
E2-шаг.¶
Постройте функцию \(Q(\theta | \theta_{old}) = E_{Z | X, \theta}(\ell(x, z | \theta) | x, \theta_{old})\).
По формуле условной вероятности: $\( p(x, z | \theta) = p(x | \theta, z) \times p(z) \)$
M-шаг.¶
Выведите формулы для максимизации \(Q\).
Аналогично,
Далее:
Аналогично для \(\sigma_2^{2, new}\).
Далее:
# Реализуйте формулы для одного M-шага
mu_1 = np.sum(p_z_1 * x) / np.sum(p_z_1)
mu_2 = np.sum((1-p_z_1) * x) / np.sum(1-p_z_1)
sigma2_1 = np.sum((x - mu_1) ** 2 * p_z_1)/ np.sum(p_z_1)
sigma2_2 = np.sum((x - mu_2) ** 2 * (1 - p_z_1))/ np.sum(1 - p_z_1)
p1 = np.sum(p_z_1) / len(x)
theta_new = np.array([mu_1, sigma2_1, mu_2, sigma2_2, p1])
theta
array([-2.79858911, 4.69844652, 6.59830393, 4.69844652, 0.5 ])
theta_new
array([0.01920326, 1.45048155, 3.83743546, 1.30562653, 0.48023499])
Решение задачи кластеризации.¶
На каждом шаге будем дополнительно рассчитывать значение \(Q\). Для этого определим дополнительные функции:
# Логарифм функции плотности x
def lnf(x, mu, sigma2):
return -1/2 * np.log(2 * np.pi * sigma2) - 1/2 * (x - mu) ** 2 / sigma2
def Q_f(x, theta, p_z_1):
ell1 = lnf(x, theta[0], theta[1]) + np.log(theta[4])
ell2 = lnf(x, theta[2], theta[3]) + np.log(1 - theta[4])
return np.sum(p_z_1 * ell1 + (1 - p_z_1) * ell2)
Соберём E- и М-шаги в функцию.
def EM(x, theta):
Q_history = []
for i in range(100):
# E-step
p_z_1 = f(x, mu = theta[0], sigma2 = theta[1]) * theta[4] / (theta[4] * f(x, mu = theta[0], sigma2 = theta[1]) +
(1-theta[4]) * f(x, mu = theta[2], sigma2 = theta[3]))
# M-step
mu_1 = np.sum(p_z_1 * x) / np.sum(p_z_1)
mu_2 = np.sum((1-p_z_1) * x) / np.sum(1-p_z_1)
sigma2_1 = np.sum((x - mu_1) ** 2 * p_z_1)/ np.sum(p_z_1)
sigma2_2 = np.sum((x - mu_2) ** 2 * (1-p_z_1))/ np.sum(1 - p_z_1)
p1 = np.sum(p_z_1) / len(x)
theta_new = np.array([mu_1, sigma2_1, mu_2, sigma2_2, p1])
theta = theta_new
Q_history.append(Q_f(x, theta, p_z_1))
if len(Q_history) > 1:
if np.linalg.norm(Q_history[-1] - Q_history[-2]) < 1e-8:
break
return theta, Q_history
# Реинициализируем для удобства
np.random.seed(123)
y1 = np.random.normal(0, 1, 100)
y2 = np.random.normal(4, 1, 100)
x = np.concatenate((y1, y2))
theta = np.array([np.min(x), (np.max(x) - np.min(x)) / 2, np.max(x), (np.max(x) - np.min(x)) / 2, 1/2])
theta, Q = EM(x, theta)
# Вспомним, что theta = (mu1, sigma2_1, mu2, sigma2_2, p1)
theta
array([0.1335007 , 1.45409172, 4.09054136, 0.72902767, 0.52735233])
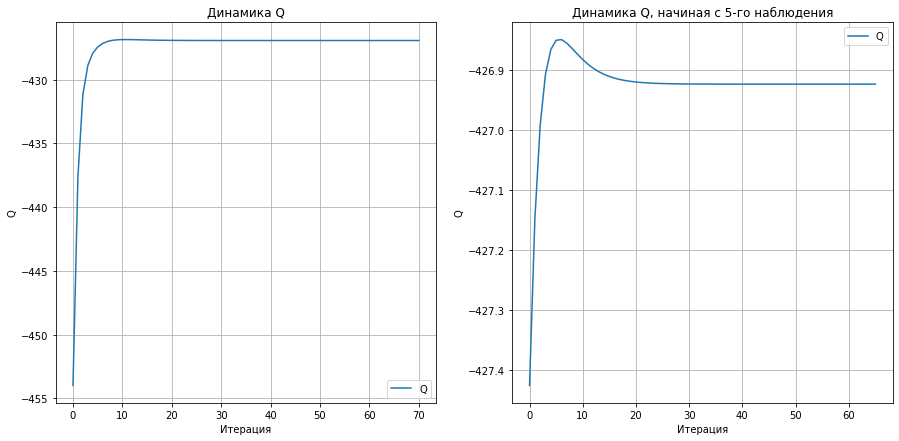
fig, ax = plt.subplots(1, 2, figsize = (15, 7))
ax[0].plot(Q, label = 'Q')
ax[0].legend()
ax[0].grid()
ax[0].set_xlabel("Итерация")
ax[0].set_ylabel("Q")
_ = ax[0].set_title("Динамика Q")
ax[1].plot(Q[5:], label = 'Q')
ax[1].legend()
ax[1].grid()
ax[1].set_xlabel("Итерация")
ax[1].set_ylabel("Q")
_ = ax[1].set_title("Динамика Q, начиная с 5-го наблюдения")
Динамика Q.¶
Во многих источниках утверждается, что на каждой итерации EM-алгоритма значение неполного правдоподобия не уменьшается. Доказывается это следующим образом.
Последнее равенство верно, потому что после E-шага значение неполного правдоподобия совпадает с его нижней оценкой.
Заметим, однако, что мы можем сделать вывод только о неполном правдоподобии
но не об ожидаемом неполном правдподобии
то есть мы ничего не можем сказать о соотношениях нижней оценки на правдоподобие, если используются значения \(P(Z = j)\) до и после E-шага. Можно заметить, что из этого следует, что мы также не можем сравнить
На практике это означает, что динамика \(Q\) может оказаться не монотонной, что мы и увидели в примере выше (другими словами это описано здесь).
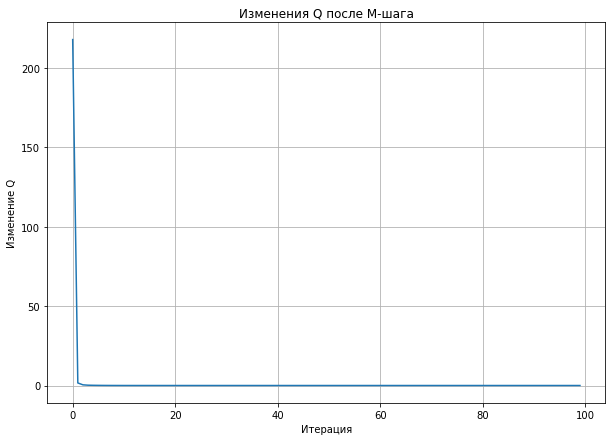
Заметим, что динамика изменения \(Q\) до и после M-шага обязана быть монотонной в соответствии с доказательством выше.
def EM_dynamics(x, theta):
Q_M = []
for i in range(100):
# E-step
p_z_1 = f(x, mu = theta[0], sigma2 = theta[1]) * theta[4] / (theta[4] * f(x, mu = theta[0], sigma2 = theta[1]) +
(1-theta[4]) * f(x, mu = theta[2], sigma2 = theta[3]))
# Рассчитаем Q до M-шага
Q_0 = Q_f(x, theta, p_z_1)
# M-step
mu_1 = np.sum(p_z_1 * x) / np.sum(p_z_1)
mu_2 = np.sum((1-p_z_1) * x) / np.sum(1-p_z_1)
sigma2_1 = np.sum((x - mu_1) ** 2 * p_z_1)/ np.sum(p_z_1)
sigma2_2 = np.sum((x - mu_2) ** 2 * (1-p_z_1))/ np.sum(1 - p_z_1)
p1 = np.sum(p_z_1) / len(x)
theta_new = np.array([mu_1, sigma2_1, mu_2, sigma2_2, p1])
theta = theta_new
# Рассчитаем Q после M-шага и сохраним разницу
Q_M.append(Q_f(x, theta, p_z_1) - Q_0)
return theta, Q_M
# Реинициализируем для удобства
np.random.seed(123)
y1 = np.random.normal(0, 1, 100)
y2 = np.random.normal(4, 1, 100)
x = np.concatenate((y1, y2))
theta = np.array([np.min(x), (np.max(x) - np.min(x)) / 2, np.max(x), (np.max(x) - np.min(x)) / 2, 1/2])
theta, Q_M = EM_dynamics(x, theta)
# Вспомним, что theta = (mu1, sigma2_1, mu2, sigma2_2, p1)
theta
array([0.1335007 , 1.45409173, 4.09054136, 0.72902766, 0.52735233])
plt.figure(figsize = (10, 7))
plt.plot(Q_M)
plt.title("Изменения Q после M-шага")
plt.xlabel("Итерация")
plt.ylabel("Изменение Q")
plt.grid()
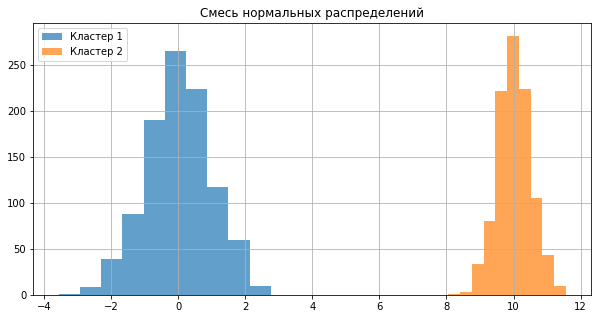
Тестирование EM-алгоритма на случайных данных.¶
Сильно разрозненные данные.¶
np.random.seed(1234)
x1 = np.random.normal(0, 1, 1000)
x2 = np.random.normal(10, 0.5, 1000)
x = np.hstack((x1, x2))
np.random.shuffle(x)
theta = np.array([np.min(x), (np.max(x) - np.min(x)) / 2, np.max(x), (np.max(x) - np.min(x)) / 2, 1/2])
plt.figure(figsize = (10, 5))
_ = plt.hist(x1, alpha = 0.7, label = 'Кластер 1')
_ = plt.hist(x2, alpha = 0.7, label = 'Кластер 2')
_ = plt.legend()
_ = plt.title("Смесь нормальных распределений")
_ = plt.grid()
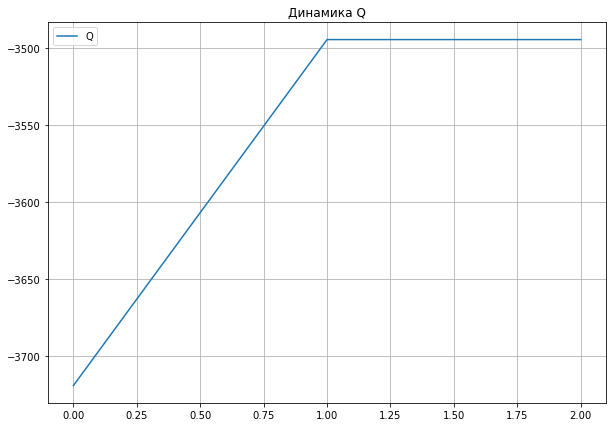
theta, Q = EM(x, theta)
theta
array([ 0.01574058, 0.94685783, 10.02088093, 0.24555588, 0.5 ])
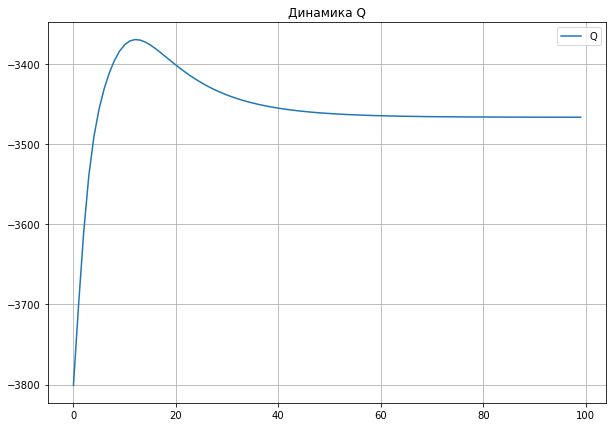
plt.figure(figsize = (10, 7))
_ = plt.plot(Q, label = 'Q')
_ = plt.legend()
_ = plt.grid()
_ = plt.title("Динамика Q")
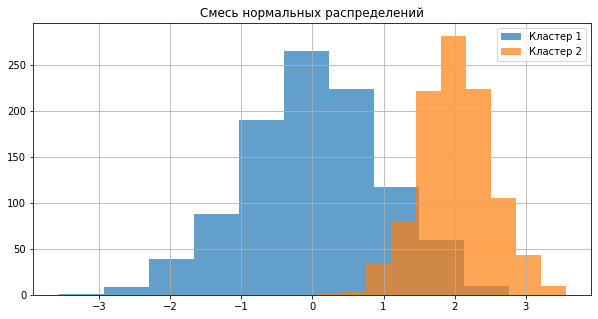
Сильно смешанные данные.¶
np.random.seed(1234)
x1 = np.random.normal(0, 1, 1000)
x2 = np.random.normal(2, 0.5, 1000)
x = np.hstack((x1, x2))
np.random.shuffle(x)
theta = np.array([np.min(x), (np.max(x) - np.min(x)) / 2, np.max(x), (np.max(x) - np.min(x)) / 2, 1/2])
plt.figure(figsize = (10, 5))
_ = plt.hist(x1, alpha = 0.7, label = 'Кластер 1')
_ = plt.hist(x2, alpha = 0.7, label = 'Кластер 2')
_ = plt.legend()
_ = plt.title("Смесь нормальных распределений")
_ = plt.grid()
theta, Q = EM(x, theta)
theta
array([-1.65246121e-03, 9.20790763e-01, 2.02135007e+00, 2.41473450e-01,
4.95817131e-01])
plt.figure(figsize = (10, 7))
_ = plt.plot(Q, label = 'Q')
_ = plt.legend()
_ = plt.grid()
_ = plt.title("Динамика Q")